
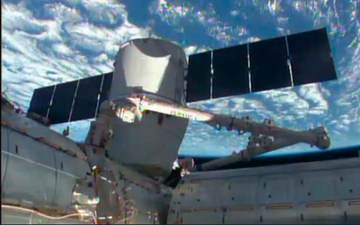
Five months since one of its kind last arrived at the International Space Station (ISS), another Dragon was captured by the tail earlier today (Tuesday, 23 September), courtesy of Expedition 41 crewmen Reid Wiseman of NASA and Alexander Gerst of the European Space Agency (ESA). Working from the multi-windowed cupola, the two astronauts grappled the cargo vessel with the station’s 57.7-foot-long (17.4-meter) Canadarm2 robotic arm at 6:52 a.m. EDT and installed it onto the Earth-facing (or “nadir”) port of the Harmony node. Completion of the two-stage capture and berthing operation was confirmed at 9:21 a.m. EDT. Dragon—which is flying the fourth of 12 dedicated missions (CRS-4) under the $1.6 billion Commercial Resupply Services contract between SpaceX and NASA—will remain affixed to the ISS for about a month, as its myriad payloads are unloaded.
The CRS-4 mission was launched, following a 24-hour weather delay, early Sunday morning, rising into darkened skies from Space Launch Complex (SLC)-40 at Cape Canaveral Air Force Station, Fla., atop a Falcon 9 v1.1 booster. Shortly after entering low-Earth orbit, Dragon unfurled its electricity-generating solar arrays and deployed its Guidance and Navigation Control (GNC) Bay Door to expose critical sensors with which it would execute an intricate, two-day rendezvous profile to reach the space station. This required the spacecraft to perform a series of thruster “burns” to establish itself on the so-called “R-Bar” (or “Earth Radius Vector”), an imaginary line running from the center of Earth toward the ISS. By approaching its quarry from “below,” Dragon took advantage of natural gravitational forces to brake its final approach and limit the need for additional burns. Similar R-Bar rendezvous regimes have been adopted since the shuttle-Mir era in the mid-1990s.
To accomplish today’s capture and berthing of CRS-4 at the Harmony node, Wiseman and Gerst rose early, ate a quick breakfast, and began setting up their laptops and other equipment in the cupola, which would afford them panoramic views of the events to come. A carefully orchestrated symphony of maneuvers brought the cargo ship to a “Hold Point” about 1.5 miles (2.4 km) from the station, where it passed a “Go-No Go” poll to proceed. Further polls and holds were made at distances of 3,700 feet (1,130 meters) and 820 feet (250 meters), with the latter “Hold Point” reached at 5:24 a.m. EDT.

Within a matter of 10 minutes, Dragon had been cleared to proceed and crept rigidly along the R-Bar at a steady, slowpoke pace of less than 3 inches (7.6 cm) per second. Passing within the so-called “Keep Out Sphere” (KOS)—a collision-avoidance exclusion zone, which extends 650 feet (200 meters) around the ISS—the cargo ship’s rate of closure had by now slowed to a little less than 2 inches (5 cm) per second. At length, watched by the Expedition 41 crew and anxious NASA and SpaceX teams in Houston, Texas, and Hawthorne, Calif., Dragon reached its next-to-last Hold Point at 100 feet (30 meters) by 6:08 a.m., where flight controllers verified good navigational data and the polling of all stations began.
Shortly thereafter, clearance was granted to advance to the 30-foot (10-meter) “Capture Point,” which would position the cargo craft within range of Canadarm2’s Latching End Effector (LEE). The robotic arm is part of Canada’s contribution to the ISS and builds on the heritage of the original “Canadarm,” the shuttle’s Remote Manipulator System (RMS), which supported dozens of missions and a wide variety of construction, retrieval, deployment, and repair tasks from 1981-2011. It was also the 12th capture of a cargo craft by Canadarm2, which was installed aboard the ISS in April 2001. Since September 2009, it has supported the capture and berthing of four H-II Transfer Vehicles (HTVs) on behalf of the Japan Aerospace Exploration Agency (JAXA), five Dragons—including the Commercial Orbital Transportation Services (COTS) Demo in May 2012 and four dedicated CRS flights—and three Cygnus resupply ships for Orbital Sciences Corp., the most recent of which arrived in mid-July.
By 6:43 a.m., controlled deftly by Alexander Gerst, the extended Canadarm2 was within the 30-foot (10-meter) range of Dragon. Two minutes later, Gerst and Wiseman received a formal “Go for Capture.” The official time at which Canadarm2’s LEE grappled the cargo ship was 6:52 a.m., exactly 53 hours since launch, as Dragon and the ISS flew high above the Pacific Ocean. “This was, indeed, a great flight of Dragon toward the station,” radioed Gerst in the moments after capture, “and we’re happy to have a new vehicle on-board.”
Over the following 2.5 hours, the crew and Mission Control worked to maneuver the new arrival toward its eventual berthing location on the nadir interface of the Harmony node. The physical berthing occurred in two phases. “First-Stage Capture” saw hooks from Harmony’s nadir Common Berthing Mechanism (CBM) extend and grab Dragon to pull their respective CBMs into contact. It was achieved at 9:16 a.m., to be followed by “Second-Stage Capture,” in which a series of 16 bolts were driven to rigidize the two vehicles in a tight, mechanized embrace. Completion of Second-Stage Capture was confirmed by NASA just a few minutes later, at 9:21 a.m. Following berthing, the Expedition 41 crew—which, in addition to Wiseman and Gerst, also includes Russia’s Maksim Surayev—were given a “Go” to begin pressurizing the vestibule from the Harmony nadir hatch into Dragon, allowing them to access the cargo craft.
Today’s arrival of CRS-4 marks the second Dragon of 2014, following the CRS-3 mission in April-May, and the fifth overall flight by a member of SpaceX’s unpiloted cargo craft. Following the COTS Demo in May 2012, the dedicated CRS-1 mission took place in October 2012 and CRS-2 in March 2013. Under the language of the $1.6 billion CRS contract, SpaceX is tasked with delivering upwards of 44,000 pounds (20,000 kg) of equipment, payloads, and supplies to the ISS by 2016, involving 12 dedicated Dragons. With the arrival of CRS-4, SpaceX has completed one-third of these missions.
The cargo ship is loaded with about 5,000 pounds (2,270 kg) of supplies. This includes 1,644 pounds (746 kg) of scientific experiments and materials to support 255 research investigations which will take place during the current Expedition 41 and forthcoming Expedition 42 missions, through the spring of 2015. Its science experiments will enable model organism research, using 20 rodents, fruit flies, and plants, whilst several new technology demonstrations will permit studies of astronauts’ bone density, the movement and positioning of small satellites with state-of-the-art thrusters, and the first 3-D printer in space for additive manufacturing.
Of specific note is NASA’s $26 million Rapid Scatterometer (RapidScat), which will be one of two powered payloads stored in Dragon’s unpressurized “Trunk” for the journey to the ISS. This 1,300-pound (590-kg) experiment will be robotically removed from the Trunk, by means of Canadarm2, and installed onto the exterior of Europe’s Columbus laboratory. Using low-energy microwave emissions, RapidScat will monitor the velocity and direction of oceanic winds and is expected to yield valuable data to complement three other operational satellite scatterometers. The European MetOp-A and MetOp-B missions, launched in October 2006 and September 2012, together with India’s OceanSat-2, which was delivered into orbit in September 2009, have all made significant inroads into an international effort to understand the ways in which interactions between the oceans and the atmosphere influence Earth’s climate. When it is operational, RapidScat’s position aboard the ISS—which operates in a high-inclination orbit of 51.6 degrees to the equator—will allow it to cross the orbital tracks of its three sister satellites, thus providing a valuable calibration source.
The urgent need for such a mission has become particularly acute in the last few years. Back in June 1978, NASA launched its short-lived Seasat mission, which offered great insights into oceanic behavior from a space-based instrument, and in June 1999 the agency lofted its Quick Scatterometer (QuikScat) spacecraft. The latter included a scatterometer called “SeaWinds,” whose 3.3-foot (1-meter) rotating antenna functioned for more than a decade, until it suffered a bearing failure on its motor in November 2009. This significantly impaired its ability to perform ocean wind measurements.

Last year, NASA announced its intention to launch a replacement instrument, assembled from spare parts left over from the development of QuikScat and the Advanced Earth Observing Satellite (ADEOS)-II, a joint U.S., Japanese, and French mission, launched in December 2002. “The ability for NASA to quickly reuse this hardware and launch it to the space station is a great example of a low-cost approach that will have high benefits to science and life here on Earth,” said ISS Program Manager Mike Suffredini. His praise was echoed by RapidScat Project Manager Howard Eisen: “RapidScat represents a low cost approach to acquiring valuable wind vector data for improving global monitoring of hurricanes and other high intensity storms. By leveraging the capabilities of the International Space Station and recycling left over hardware, we will acquire good science data at a fraction of the investment needed to launch a new satellite.”
Remarkably, RapidScat rose from planning to reality in barely 18 months, with Suffredini having offered Eisen’s team a mounting location on the Columbus module and a “free ride” aboard Dragon. “This accelerated timeline,” noted a NASA news release, “is a blink of an eye for NASA, where the typical project is years or decades in the making.” Much of the progress is attributable to the instrument’s use of commercial, off-the-shelf computer hardware, but has met with difficulties, not least the procurement of connectors which will enable RapidScat to physically attach itself to the ISS. “They’re special robotically-mated connectors that haven’t been made in years,” Eisen said. “We’re having to convince the company that produces these connectors to make us a small run in time for the mission and it hasn’t been easy.”
With MetOp-A and B and OceanSat-2 operating in polar orbits, the course of the space station’s 51.6-degree orbit will carry RapidScat over Earth’s surface at constantly changing times of day. Since oceanic winds are greatly affected by solar radiation—which also varies with the time of day—trends which currently escape the notice of the European and Indian scatterometers should be detectable by RapidScat. “We’ll be able to see how wind speed changes with the time of day,” said Project Scientist Ernesto Rodríguez. “RapidScat will link together all previous and current scatterometer missions, providing us with a more complete picture of how ocean winds change. Combined with data from the European ASCAT scatterometer mission, we’ll be able to observe 90 percent of Earth’s surface at least once a day, and in many places, several times a day.”
Present plans envisage Dragon remaining berthed at the ISS for about four weeks. It will then be loaded with supplies, hardware and computer equipment, experiment results, and four powered payloads for its return to Earth. In total, about 3,800 pounds (1,720 kg) of payloads are expected to be brought back home when the CRS-4 spacecraft performs a parachute-assisted splashdown off the coast of Baja California in mid-October.
Want to keep up-to-date with all things space? Be sure to “Like” AmericaSpace on Facebook and follow us on Twitter: @AmericaSpace
Missions » ISS » COTS » CRS-4 »
Go Dragon, go SpaceX!!!!!!!
Captain! There be dragons here!