
Only days after both NASA and the European Space Agency (ESA) announced that the return to Earth of Soyuz TMA-15M would be postponed until early June and the launch of the Soyuz TMA-17M crew pushed back from 26 May until the end of July—all as a direct consequence of the recent Progress M-27M failure—plans to begin a major reconfiguration of the U.S. Orbital Segment (USOS) of the International Space Station (ISS) have been brought forward. AmericaSpace understands that the first step in a process which will prepare the station to support Commercial Crew vehicles from 2017 will now get underway on 27 May, as the Leonardo Permanent Multipurpose Module (PMM) is robotically detached from the Earth-facing (or “nadir”) port of the Unity node, via the 57.7-foot-long (17.6-meter) Canadarm2 robotic arm, and maneuvered to a new position at the forward end of the Tranquility node. The movement of the Leonardo PMM forms part of a wider effort, involving up to five U.S. EVAs and over 800 hours of internal work, spread across three ISS expeditions, as the USOS undergoes its most significant phase of reconfiguration since the twilight of the Space Shuttle era. At the same time, earlier this week, the first of two International Docking Adapters (IDA-1) was officially handed over by NASA to SpaceX, in readiness for its launch to the ISS on 19 June.
As detailed in an earlier AmericaSpace article, the need to equip the station with a pair of International Docking Adapters (IDAs) for SpaceX’s Dragon V-2 and Boeing’s CST-100 piloted vehicles has driven this relocation plan. IDA-1 is currently scheduled to be launched aboard SpaceX’s CRS-7 Dragon on 19 June, after which it will be attached to Pressurized Mating Adapter (PMA)-2, at the forward end of the Harmony node. IDA-2 will then follow in December, aboard the CRS-9 Dragon, and will be mated to PMA-3 on the space-facing (or “zenith”) face of Harmony. This will satisfy a key USOS requirement to always have two docking locations—a primary and a backup—for piloted vehicles.
However, the ISS also requires two berthing locations for unpiloted craft, including SpaceX’s cargo-carrying Dragon, Orbital Sciences’ Cygnus and Japan’s H-II Transfer Vehicle (HTV). At present, there exists the facility to berth these vehicles at either the Earth-facing (“nadir”) or zenith ports of Harmony, but when the latter is retasked as a docking port, it will leave the USOS with just one berthing location. In order to “open up” a new berthing place, the Leonardo PMM will be robotically removed from its current position at the nadir interface of the Unity node and transferred to the forward port of the Tranquility node. The result, by the end of 2015, should therefore see two docking locations for piloted vehicles at Harmony forward and zenith and two berthing spots for unpiloted craft at Harmony and Unity nadir.

The Leonardo PMM began its operational life as a Multi-Purpose Logistics Module (MPLM) and launched aboard the shuttle on eight occasions between March 2001 and its permanent installation on the ISS in February 2011. Weighing 22,000 pounds (10,000 kg), the module measures 22 feet (6.7 meters) in length and 14 feet (4.2 meters) in diameter. Original plans called for the Leonardo PMM relocation to get underway in mid-June, but in the aftermath of the Progress M-27M failure and the delayed arrival of the Soyuz TMA-17M crew until late July, NASA and its International Partners (IPs) have agreed to advance this task to 27 May. “We expect the relocation itself to take a few hours,” NASA’s Rob Navias told AmericaSpace, “with the previous and following days involved in internal systems configuration.” It was noted that this internal activity—involving the present USOS crew of Expedition 43 Commander Terry Virts, Italy’s first woman in space, Samantha Cristoforetti, and One Year crewman Scott Kelly—will consist of jumper cable and valve configuration work for Unity and Tranquility to accommodate the relocation.
According to Mr. Navias, the actual movement of the Leonardo PMM by the space station’s Canadarm2 robotic arm will be conducted by the Robotics Officer (ROBO) in Mission Control, whilst the Expedition 43 crew will be responsible for configuring the Common Berthing Mechanisms (CBMs) at Unity nadir and Tranquility forward. Specifically, they will install a “Node-1 Berthing Kit” inside Unity to provide power and data support for future unpiloted visitors. NASA TV will cover the Leonardo PMM relocation, beginning at 8:30 a.m. EDT. Several external work tasks at the Tranquility forward location—including the removal of a Non-Propulsive Vent (NPV) and obstructive handrail, the release of Launch Locks, the opening of a Centerline Berthing Camera System (CBCS) “flap” and a visual check of the satisfactory performance of the CBM “petals”—were performed during February’s EVA-30 by Expedition 42 Commander Barry “Butch” Wilmore.
As a result, the Leonardo PMM relocation will provide the required clearances and approach corridors for visiting vehicles, both piloted and unpiloted, with Japan’s HTV-5 expected to become the first to utilize both Unity nadir and Harmony nadir when it arrives at the ISS in mid-August. Due to equipment interference issues relating to spacecraft proximity operations, the HTV must berth and unberth from Harmony nadir, but as part of a unique “Dual Visiting Vehicles Berthed Simulation”—involving SpaceX’s CRS-8 Dragon and marking the first occasion that as many as two unpiloted visitors have been in simultaneous residence at the USOS—will be robotically transferred to Unity nadir, shortly after its arrival. It will remain there for about six weeks, after which CRS-8 will depart Harmony nadir and HTV-5 will be moved into its place for a final unberthing and departure in early October. Like a space-based game of musical chairs, this is expected to validate the capability for as many as two unpiloted visitors to be berthed at the USOS at the same time.

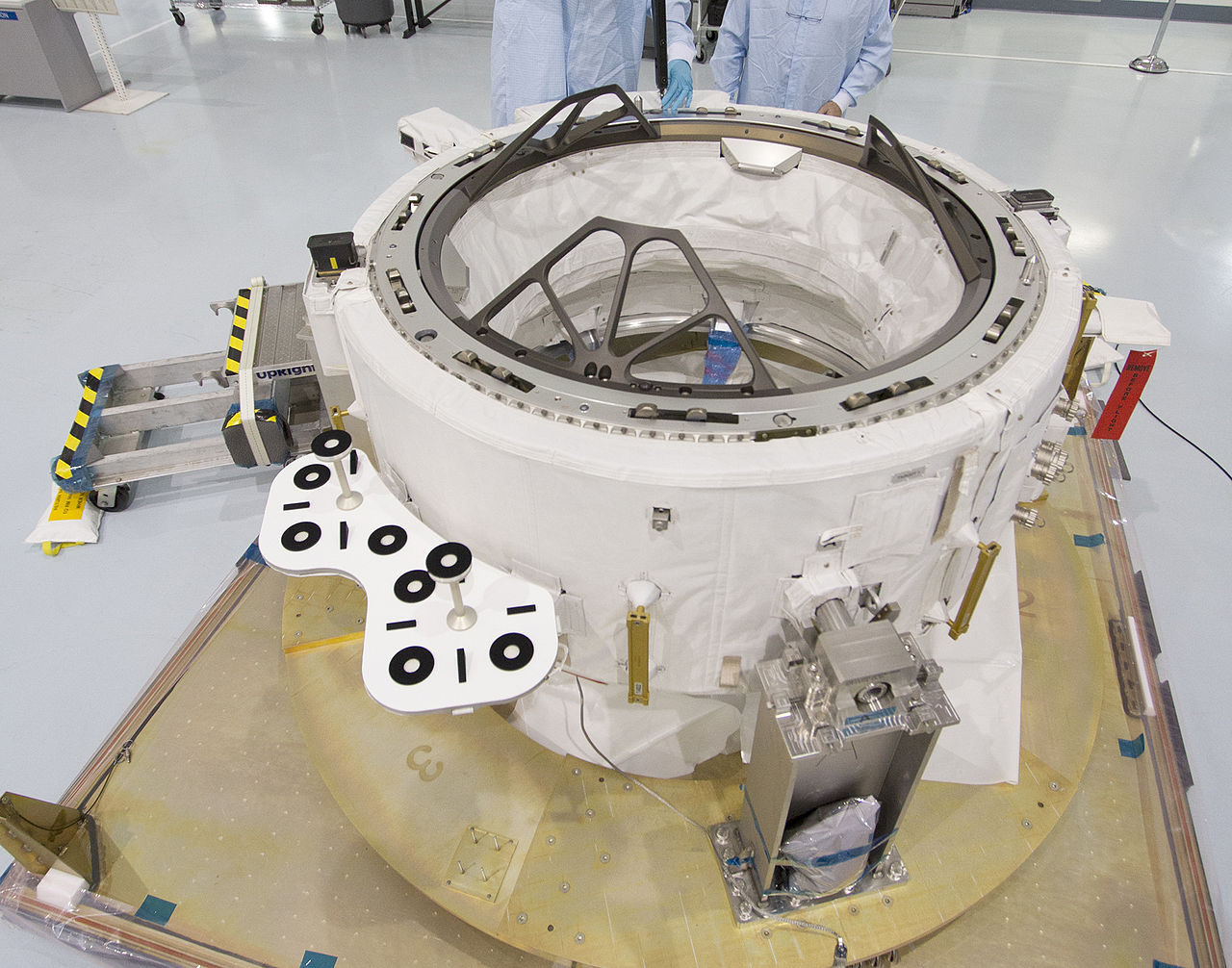
Yet the relocation of the Leonardo PMM is only the start of what will be a dramatic year and which will see a very different configuration of the USOS in a matter of just a few months. The first of two Boeing-built International Docking Adapters (IDA-1) is scheduled to fly next month aboard the CRS-7 Dragon. In February 2015, the 1,150-pound (520 kg) docking adapter was delivered from Boeing’s Houston Product Support Center (HPSC) to the Kennedy Space Center (KSC) in Florida, and on Monday, 11 May, the paperwork was officially signed, transferring responsibility from NASA to SpaceX. “IDA-1 was handed over to SpaceX for processing today,” NASA told AmericaSpace on Monday afternoon, “and is in the Payload Processing Facility down at the Cape.”
It marks the latest milestone for IDA-1, a squat cylinder measuring about 30 inches (76.2 cm) in height. Although Boeing served as Lead Integration Contractor, products for the docking adapters have been drawn from around 25 U.S. states. For flight, it will ride aboard the unpressurized “trunk” of the CRS-7 Dragon—the seventh of at least 12 dedicated cargo flights under SpaceX’s $1.6 billion Commercial Resupply Services contract with NASA—and represents one of the heaviest payloads ever transported to the ISS by the Hawthorne, Calif.-based launch provider. Putting IDA-1 into context, the large Cloud Aerosol Transport System (CATS), lofted aboard the CRS-5 Dragon in January 2015 and later installed onto the external facility of Japan’s Kibo laboratory, weighed 1,089 pounds (494 kg), whilst the Rapid Scatterometer (RapidScat), delivered aboard the CRS-4 Dragon in September 2014 totaled 1,280 pounds (580 kg).
IDA-1 is fully compliant with the International Docking System Standard (IDSS). This effort by the ISS Multilateral Co-ordination Board sought to create an international docking standard for the USOS, which presently consists of U.S., European, Japanese and Canadian modules and other hardware assets. In conference notes from Headquarters in Washington, D.C., in April 2011, NASA rationalized the need for this standard. “Connecting spacecraft from different nations has required unique development and expensive integration and test,” it was explained. “Expansion of spacefaring nations (and non-governmental entities) will compound this issue in the future. Exploration co-operation could be much easier with internationally accepted interface standards.” As well as having a firm heritage in flight-proven designs, the IDSS also incorporates low-impact technology, which “accommodates a wide range of vehicle contact and capture conditions.”
“The International Docking Adapter is actually the first implementation of our International Docking System Standard,” explained Sean Kelly, NASA’s Senior Project Manager for Relocation & IDA, speaking in February 2015. “We’ve developed that over the last few years with all of our International Partners, so it’s really the first standard that we have in the spaceflight business and, as such, we wanted to lead the way and NASA established an effort to develop the International Docking Adapter. We tried to put the emphasis on “international”, because although it’s in the critical path for Commercial Crew, it’s also a key element for what we plan for other international partners to come visit Space Station and start utilizing it in the future.”
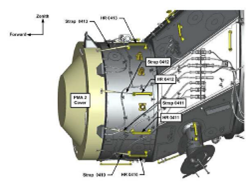
IDA-1 will travel into orbit suspended “under” Dragon, in its trunk, with circumferential trunnion pins providing secure attachment for the journey uphill. The installation of IDA-1 onto the PMA-2 interface at the extreme forward end of the Harmony node requires a combined robotics and spacewalking operation. Originally, this spacewalk—designated “U.S. EVA-32”—would have been performed in July, involving Expedition 44 astronauts Scott Kelly and Kjell Lindgren. With the arrival of Lindgren at the ISS aboard Soyuz TMA-17M now delayed until at least the end of July, EVA-32 will be correspondingly postponed into the late summer. When the team is ready to execute the operation, IDA-1 will be detached from Dragon’s trunk, by means of Canadarm2 and the Dextre Special Purpose Dextrous Manipulator (SPDM), and positioned between 10 inches (25 cm) and 2 feet (60 cm) from the forward end of PMA-2. Kelly and Lindgren will then attach tether straps to IDA-1, whereupon it will be released by the ISS robotics and manually maneuvered into position by the spacewalkers. External connectors and internal switches and driven hook-motors will be closed to permit full integration.
“We’ve made sure that all of the crew members who are potential candidates for installing it have had the opportunity to see it [and] get familiar with the hardware,” explained Sean Kelly in February. He described IDA-1 as “a big, heavy object for them to move around, from a mass point of view”. Like other ISS components, it carries EVA handrails around its circumference and at its base is a sealing surface to interface with the PMA, together with a trio of “guide petals” and mechanical latches for accurate installation. “These latches will strike over to the IDA on their striker plates and that’s how the attachment of the visiting vehicle to the IDA will happen,” said Mr. Kelly. “That normally happens with the Soft Capture system extended and then that Soft Capture system retracts, thereby making the two halves of the docking system go together and mate. That creates a pressurized seal and a structural seal between the two of them.”
After a visiting vehicle has docked, power and data exchange will occur automatically. “But there’s also air exchange that has to happen,” continued Mr. Kelly. “They [the crew] have to put in some duct work and that’s to allow air exchange between the Visiting Vehicle and the space station, once it’s docked.” The crew will also remove a rendezvous target, used during the docking process, in order to achieve a smooth ingress into the ISS. Current plans envisage the first piloted voyages by SpaceX’s Dragon V-2 and Boeing’s CST-100 to take place around mid-2017.
The installation of IDA-1 will effectively convert the PMA-2 docking interface from its original Androgynous Peripheral Attach System (APAS)-95 specification to Boeing’s new Soft Impact Mating and Attenuation Concept (SIMAC), which NASA accepted in late 2012 to satisfy its Commercial Crew requirements and replace earlier plans for an international Low Impact Docking System (iLIDS) soft-capture mechanism. Although the PMA-2/IDS-1 port will provide the primary docking point for Commercial Crew vehicles, the necessity of a backup interface for contingency purposes requires the movement of the PMA-3 adapter in October 2015 from its current position on the port side of the Tranquility node to the zenith face of Harmony. Like the Leonardo PMM relocation, this will be a robotics task, with the ISS crew providing internal reconfiguration. Shortly afterwards, Kelly and Lindgren are expected to perform two spacewalks (U.S. EVAs 33 and 34) to complete the installation process, thus preparing the PMA-3/Harmony location for the arrival of IDA-2.
Rounding out the year, the CRS-9 Dragon is scheduled to deliver IDA-2 to the station in early December, after which Kelly and Expedition 45 crewmate Tim Kopra will perform a spacewalk—similar in purpose to EVA-32—to install the new adapter onto PMA-3. Calling the two PMAs “the basis” for the IDAs, Sean Kelly has described this year’s work as “the largest project we’ve done, certainly since the end of the shuttle program”. He added that it would span three ISS increments, five EVAs and about 800 hours of internal crew time to reconfigure the space station. “It’s a very exciting project to do,” he said, “and we’re really setting the gateway for the future for Commercial Crew and other international partners to come to the International Space Station.”
However, a word of caution was expressed by incoming Expedition 44/45 crew member Kjell Lindgren at his crew’s recent press conference at the Johnson Space Center (JSC) in Houston, Texas. Responding to a media question, he expressed keen awareness that the priority is ongoing ISS research, in keeping with the space station’s role as a U.S. National Laboratory, and that this must continue regardless of the relocation activity and movement of payload racks to lay power cables and other utilities. “We have a whole planning division that’s working with the knowledge that we’re going to be rotating racks and doing other things that can impact science,” Lindgren said, “so we’re going to try and mitigate and reduce the impact of reconfiguration on science as much as possible.”
Want to keep up-to-date with all things space? Be sure to “Like” AmericaSpace on Facebook and follow us on Twitter: @AmericaSpace
“-five EVAs and about 800 hours of internal crew time to reconfigure the space station.”
Get it ready for the tourists. Our tax dollars at work. The ISS needs to close shop; 40 years of LEO space stations is ENOUGH!