This article originally appeared in The Mars Society’s The Mars Quarterly. As part of AmericaSpace’s partnership with The Mars Society, they publish stories produced by our staff first and then they are re-posted on AmericaSpace.
On July 4, 1997, a rover the size of a remote-controlled car touched down on the surface of Mars. Its name was Sojourner. Sojourner was part of NASA’s Mars Pathfinder mission, the space agency’s first unmanned rover sent to explore another world—and it would not be the last.
Some sixteen years after Sojourner’s mission, two of her descendants are currently exploring different sections of the Red Planet. These two rovers and others planned for the future, while far different from Sojourner, bear striking similarities to the little rover that touched down on the rock-strewn plains of Ares Vallis on Mars all those years ago.
Sojourner was actually part of the Mars Pathfinder mission and was comprised of the Mars Pathfinder stationary platform as well as the Sojourner rover. After arriving safely on Mars, the lander was renamed the Carl Sagan Memorial Station in honor of the famous astronomer who championed space exploration.
Mars Pathfinder was launched in December 1996 atop a Delta II rocket from Cape Canaveral Air Force Station’s Space Launch Complex 17 in Florida. Once it touched down on Mars, the lander opened its panels, much like a flower, exposing the Sojourner rover and its various scientific experiments.

While Pathfinder and the Sojourner rover were sent to Mars to find out more about the planet’s atmosphere and geography, they also were technology demonstrators, and after the rover and Carl Sagan Memorial Station fell silent in September 1997, NASA began looking at ways to beef up Sojourner—and brought back a method that allowed the space agency to hedge its bets, one that harkened back to an earlier era in Martian space exploration.
The “next step” was to take the lander out of the equation and design a rover that did not need a landing platform. It, or rather they, would use several pieces of technology which were proven on Sojourner.
The method of landing a spacecraft on another planet via an airbag had been proven on the Mars Pathfinder mission and would once again be used to land NASA’s Mars Exploration Rovers (MER) on the Red Planet.
The twin rovers used these airbags to touch down on the surface of Mars in January 2004 (they launched from the same launch complex and type of rocket that Sojourner used).
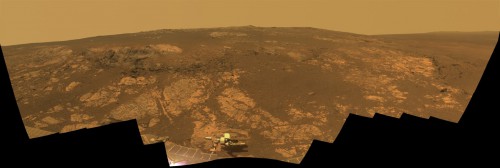
In the 1970s, NASA wanted to increase the chances that a Viking lander would reach the surface of Mars—so it launched two of them. In 2004, NASA revisited this policy and launched two MER rovers, named Spirit and Opportunity. They were given these names by a young girl named Sofi Collis through a naming contest held by NASA in 2004.
Besides using an airbag system like Sojourner, the twin MER rovers also employed a wheel design similar to the one that proved successful on the Mars Pathfinder mission.
“Sojourner was the first rover to incorporate the rocker-bogie suspension system (as designed by JPELer Don Bickler), that effectively enabled the rover to drive over obstacles higher than its wheels, while minimizing the tilt of the rover’s main body. The rocker-bogie suspension design has been adapted for both the MER and MSL rovers to maximize their mobility performance,” said JPL’s Mars Science Laboratory Integrated Planning and Execution Team Chief Andrew Mishkin.
NASA realized that the rover template tested on Sojourner and proven on the twin MER robotic explorers worked very well, and decided to take the next step. The space agency’s efforts in this regard would see the largest unmanned, wheeled robot safely land on another world and conduct scientific research. This rover would be huge and carry its own laboratory—hence its name, the Mars Science Laboratory.
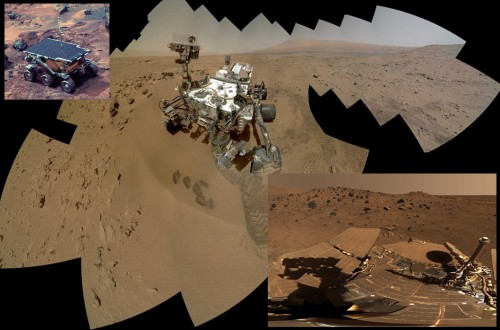
The Mars Science Laboratory rover was later dubbed Curiosity, through another of NASA’s naming contests (this time by schoolgirl Clara Ma). Unlike the other Mars rovers, Curiosity launched atop one of United Launch Alliance’s venerable Atlas V rockets, in the powerful 451 configuration (this iteration has four Aerojet-supplied solid rocket boosters). Curiosity needed the extra-added punch to send the one-ton rover (Curiosity is about the size of a compact car) to Mars.
The nuclear-powered robot was far too large to use the airbags that its descendants did. Instead, NASA tapped the sky crane to safely drop Curiosity onto the Martian regolith. This might seem similar to how the Viking landers touched down, but it was anything but similar. The sky crane carried the Curiosity rover tucked underneath it; the rover was then lowered to the surface via umbilical cables. Once the sky crane detected the rover was safely on the surface, the cables were cut and the sky crane traveled a safe distance away where it impacted the surface.
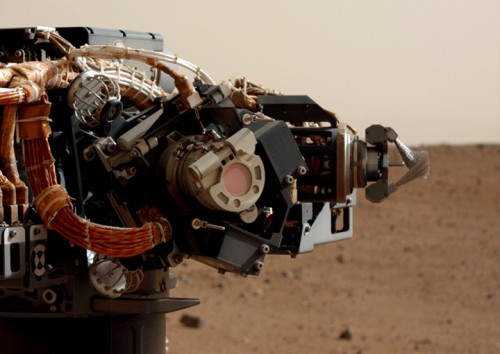
Mishkin also highlighted some of the other technology that Sojourner tested that later rovers benefitted from. The tiny robot employed a hazard avoidance system that has been used on all of her descendants; this could be described as a simplistic artificial intelligence, one that sometimes counters the intentions of controllers on the ground. This helps them from making a mistake that could end a multi-million or even billion-dollar mission.
“All of the rovers, from Sojourner to MER to MSL, have used vision-based obstacle detection. However, Sojourner relied on a relatively simple light-striping system, while MER and MSL have used stereo vision to construct obstacle maps,” Mishkin said. “Sojourner introduced the approach of event-driven sequencing to rovers, in which each command is executed when the prior command completes, rather than at a specified time. This method significantly reduced the time for command sequencing and validation, and has been employed on the much more complex MER and MSL rovers.”
Things have not always gone the rovers’ way, but the basic design concepts that were tested out on Sojourner have proven to be highly successful. For example, Opportunity, one of the twin MER rovers, was scheduled to last a mere ninety days. She is now on her ninth year roving the Red Planet. Her sister, Spirit, got stuck in 2009 and was converted into a stationary research station. Almost a year after that point, she ceased operations.
There can be no arguing that Sojourner and MSL are very different. Sojourner was a small rover that was dependent on the landing station. All total the mission lasted about a month. Curiosity has a planned lifespan of two years; it has no station holding it in place, a nuclear power pack, arrived on Mars via a “James Bond” jet pack, and has a mast that is as tall as a man. However, if one looks close enough, one can see characteristics that were passed on from the tiny rover, and this will also be evident in future NASA missions.
NASA has stated plans to launch a rover very similar to Curiosity in 2020. When this occurs, the legacy begun by Sojourner in 1997 will have lasted nearly a quarter of a century, and there can be little doubt that the tiny rover’s legacy will empower future robotic explorers for years to come.
There is no doubt as to the technical and scientifig genius that went into designing these spacecraft. The wealth of scientific information gleaned from these explorers has accelerated planetary exploration to the point where even greater discoveries await us. It is precisely these kinds of endeavors that not only satisfy human curiosity but also kindle creative intellectual thought.
Tom, when you decide to run for Congress please let me know – you’ve got a contribution to your campaign fund coming your way.
Please allow me to share this extremely magnificent and moving video called ‘Curiosity: Carl Sagan’s vision of robotic exploration on Mars’. It chronicles Mars robotic exploration through the words of Carl Sagan.
http://www.youtube.com/watch?v=x43pUyZSs5E&list=SP73E5E40315EA40FE&index=26
It never fails to choke me up…
Many thanks for the GREAT link Leonidas! This video should be mandatory viewing in every classroom in the country (as well as Congress and the White House, but that’s a different story).
It has become commonplace (and a rather tired and worn-out cliche in my country) to state that the contributions of the ancient Greek civilisation in culture, science and technology helped shape later the Western civilisation and are a heritage for humanity. In my personal opinion, the contributions and advancements and the whole endeavor of space exploration (manned and unmanned) made by the US (and other countries), are the modern equivalent of the greatness of the ancient Greek civilisation. It’s the heritage of today for the present and for all the generations of the future, for all mankind.
And that is also something to be taught in schools everywhere, alongside the history lessons of the great civilisations of the past…
Leonidas, your gracious, generous, and highly articulate observations are most sincerely appreciated. A large part of our civilization, and what it has achieved, is built upon the genius of the ancient Greek civilization, for which we will always owe a great debt of gratitude to our esteemed Greek brothers and sisters. Carl Sagan once posed the question in his series “Cosmos”, “What if the great library at Alexandria not been burned, what if the ancient Greek civilization had continued to flourish?” He speculated that we would be enormously more advanced technologically, and would have mastered interplanetary travel. Leonidas, it is also a rather tired and worn-out cliche that “Those who do not learn from history, are doomed to repeat it.” That is why NASA and all that it means, all that it has done and can do, is of such critical importance.
Karol, it’s a very interesting ‘what if’ scenario. I also believe that things would have taken a completely different trajectory, had people not succumbed to stupidity and superstition. As is the case thousands of times historically, religious hate, bigotry and superstition, led to the destruction of wonderful cultural accomplishments and the halt of progress. If that halt of progress hadn’t occured, it’s possible that the 12th or 13th century wouldn’t be remember as the period of the Dark Ages, but as a period of vast interplanetary exploration.
I was reading yesterday, a very interesting article at the Beyond Apollo blog site (you really should check it out!). It had an article titled “The Purpose of the United States” dealing with the subject we’re discussing here.
From the article:
“…It addresses an important question, one that I believe all societies should ask of themselves on a regular basis. Boiled down, it can be stated as, “by what deed(s) will we be remembered?””
It’s my personal opinion, that the biggest contribution and heritage that the US is creating for the world, is the space program and space exploration. The US civilisation will be remembered for that 1.000 years from now, in the same way we remember the ancient Greeks for the library of Alexandria among other things.
You can read the full article here:
http://www.wired.com/wiredscience/2013/02/the-purpose-of-the-united-states/
Karol: Thanks. I’ve given it serious thought. I would do everything I could to support NASA funding as well as educational institutions who provide the needed scientific/technical curricula for our young people to continue America’s leadership in space exploration.
But of course. An intelligent, rational, patriotic individual like Tom who obviously puts country first and is well aware of the value of funding for NASA and STEM educational institutions would be hesitant to accept a seat in Congress in light of what it has devolved into. A dogmatic, inflexible, “party before country” egotist with little willingness to even consider the value of NASA, space exploration, or science education would gleefully dive into the morass.
My God . . . it’s “Catch 22”
Thank you for the excellent article Jason. Perhaps the Government Printing Office and the Government Bookstore could publish sets of lithographs from the Mars missions. I was fortunate to be able to purchase some of the Viking landscape images and they are breathtaking. Sales of the lithographs could help offset the cost of the next Mars rover while giving us all some really great wall art!