After more than 40,000 orbits of the Red Planet, NASA’s $720 million Mars Reconnaissance Orbiter (MRO)—launched 10 years ago today, on 12 August 2005—is showing no signs of slowing down and has already proven itself to be one of the most capable space science missions ever flown. In fact, its telecommunications system has returned more data to Earth than all other Deep Space Network (DSN)-monitored missions combined, and it stands ready for a significant role in the future exploration of the planet expected to receive its first human visitors in the coming decades. Built by Lockheed Martin, under the supervision of the Jet Propulsion Laboratory (JPL) in Pasadena, Calif., and managed for NASA’s Science Mission Directorate by the California Institute of Technology, “Mr. O” rose from Earth a full two years later than planned, pipped to the post by the twin Mars Exploration Rovers (MERs), Spirit and Opportunity. However, since its arrival at the Red Planet in March 2006, and the implementation of its final “science orbit” the following November, after a protracted period of “aerobraking,” it has brought an impressive array of imaging instruments to bear on Mars and, as a telecommunications relay and landing site scout, has contributed enormously to the missions which followed, including the Curiosity rover in Gale Crater.
Efforts to develop this remarkable mission—which is very much a “multi-purpose” spacecraft, with myriad roles and tasks—got underway in the spring of 2000, as NASA eyed the July 2003 Martian “launch window.” Two teams, one pursuing the twin MER rovers, the other the heavily instrumented MRO orbiter, began a two-month intensive study in March, and at the end of July NASA Associate Administrator for the Office of Space Science, Ed Weiler, acknowledged that it “was an extremely difficult decision to make” when he announced his decision. The MER rovers would fly first, with MRO anticipated to follow during the next Mars window, about 26 months later, in the summer of 2005. Despite the schedule slippage, MRO formed an integral part of NASA’s Mars exploration strategy, described as a mission which would “bridge the gap between surface observations and measurements from orbit,” with an imaging capability to examine landscapes at resolutions of between 8 inches (20 cm) to 12 inches (30 cm).
A year later, in October 2001, NASA selected Lockheed Martin Astronautics of Denver, Colo., to build MRO, a spacecraft which had been billed “to return the highest-resolution images yet of the Red Planet.” Under the terms of the $145 million contract, Lockheed Martin would carry responsibility for building the spacecraft bus, as well as integrating and testing six on-board research instruments. NASA had issued an Announcement of Opportunity earlier in 2001, and, by August, 26 proposals had been submitted, from which Weiler selected the final candidates in November. Describing them as “a new generation of reconnaissance instruments … with unprecedented capabilities,” he noted that MRO would “pave the way for identifying the most compelling sites on Mars for sample return and ultimately for human exploration.”

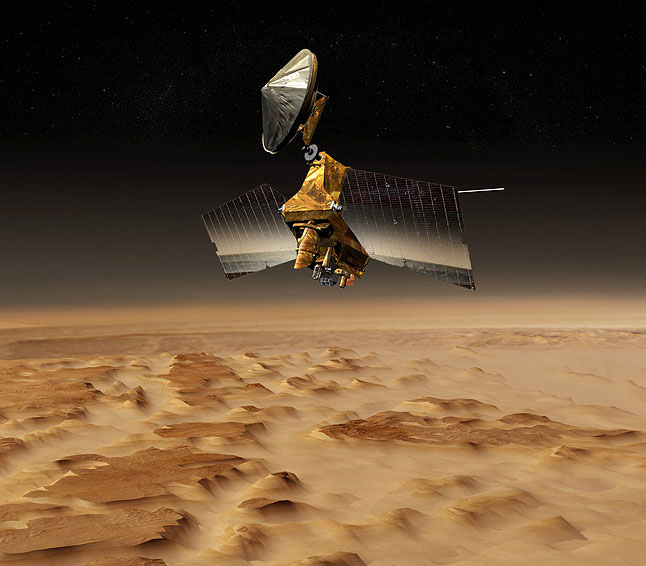
This suite of instruments was headed by the $31 million High Resolution Imaging Science Experiment (HiRISE) multi-color stereo camera—capable of resolving surface features of about 1 foot (30 cm) from an altitude of 186 miles (300 km)—which would yield images six times sharper than ever attained by previous missions, and the $17.6 million Compact Reconnaissance Imaging Spectrometer for Mars (CRISM) for visible and near-infrared mapping of the Red Planet’s surface mineralogy and analysis of the chemical signatures of ancient water features. Other members of MRO’s instrument arsenal were the Context Camera (CTX) to provide contextual mapping in support of HiRISE and CRISM, the Mars Color Imager (MARCI) and Mars Climate Sounder (MCS) for daily, planet-wide weather observations, and the Shallow Subsurface Sounding Radar (SHARAD) for probing underground ice, rock, and possible liquid water deposits. Additionally, MRO carried a pair of engineering payloads for surface communications-relay and approach navigation support for other missions.
Weighing 4,806 pounds (2,180 kg), the spacecraft was twice as massive as the 1996-launched Mars Global Surveyor and was expected to return over 12 times as much data. “With its specially designed instrument complement, this mission will investigate the surface of Mars at a resolution never before achieved from orbit,” said MRO Project Manager Jim Graf of JPL. “We will be able to resolve features the size of beach balls. The images will help determine future landing sites that are both scientifically interesting and free from landing hazards.” Fabricated from carbon composites and aluminum-honeycombed plates, MRO was equipped with a pair of power-producing solar arrays, capable of directly converting more than 26 percent of incident sunlight into electricity and generating in excess of 1,000 watts in orbit around Mars. Supplementary power was derived from two rechargeable nickel-hydrogen batteries, and, at the time of its August 2005 launch, MRO’s Telecom Subsystem was the most advanced digital communications payload ever sent into deep space. Notably, the spacecraft’s Electra UHF Software Defined Radio (SDR) provided flexibility in anticipation of evolving communications relay capabilities and was intended to support future spacecraft during their approach and landing profiles on Mars.
The mission’s principal objectives were centered upon its ability to identify local evidence of the chemical and geological “fingerprints” of water processes, which was expected to assist in guiding future landers to the best possible sites on the surface. “The goal of this orbiter is to understand the history of water on Mars, by observing its atmosphere, surface and subsurface in unprecedented detail,” explained MRO Project Scientist Richard Zurek of JPL. “The Reconnaissance Orbiter will explore from orbit several hundred localities on the surface of Mars, observing details that were previously only visible to landers.”
With the spacecraft and its payloads thus defined, International Launch Services (ILS) was chosen as the launch provider in June 2002. Under contract to NASA’s Kennedy Space Center (KSC) in Florida, it was announced that an Atlas III booster would deliver MRO aloft from Space Launch Complex (SLC)-41 at Cape Canaveral Air Force Station in August 2005. Part of the U.S. Air Force’s Evolved Expendable Launch Vehicle (EELV) program, the Atlas III was first launched in May 2000 and marked a progression from the earlier Atlas II, but it was ultimately replaced for the MRO launch by the uprated Atlas V 401. As the months ticked down to launch, the spacecraft passed smoothly through its processing and testing phases and was delivered from Denver to the Shuttle Landing Facility (SLF) at KSC aboard a C-17 Globemaster transport aircraft in April 2005 and transferred to the Payload Hazardous Servicing Facility (PHSF) for processing. Its propellant tanks were filled with hydrazine fuel and in late-July was encapsulated within the Atlas V 401 Payload Fairing (PLF), ahead of rollout of the stack from the Vertical Integration Facility (VIF) to the SLC-41 pad.

Hopes to get MRO off the ground on the first two opportunities, 10 and 11 August, proved fruitless, due to reliability concerns surrounding the Atlas V’s on-board gyroscopes, weather issues, and conflicting sensor readings in the Centaur upper stage. However, the third time proved to be charmed, as NASA’s most advanced Mars mission to date roared perfectly into space at 7:43 a.m. EDT on the 12th, right on the opening of the 120-minute window. It marked the first interplanetary voyage ever despatched atop an Atlas V, which went on to deliver NASA’s Pluto-bound New Horizons, the Jupiter-headed Juno orbiter, the Mars Science Laboratory (MSL)—bearing the Curiosity rover—and the Mars Atmosphere and Volatile Evolution (MAVEN) spacecraft.
Following a smooth transfer into low-Earth orbit, MRO was boosted onto a heliocentric trajectory, in order to rendezvous with Mars about seven months later, in March of the following year. Sixty-one minutes after leaving the Home Planet, it established radio contact with ground controllers and successfully deployed its solar arrays. In the days and weeks that followed, its instruments were activated, tested, and calibrated, and in September, from a distance of 6.2 million miles (10 million km), HiRISE and CTX photographed the Moon. Three Trajectory Correction Maneuvers (TCMs) by MRO’s six main engines were executed, the first of which occurred on 27 August, and by the beginning of February 2006 the spacecraft began its Approach Phase, preparatory to Orbital Insertion.
After passing over Mars’ southern hemisphere at an altitude of 230-250 miles (370-400 km), MRO burned its six main engines for 27 minutes on 10 March to inject itself into a highly elongated polar orbit, with a period of about 35.5 hours. This established the spacecraft into a path which brought it as close as 265 miles (426 km) and as far as 27,700 miles (44,500 km) from the planet’s ochre-hued surface. During this period, HiRISE, CTX, and MARCI were employed to obtain the first imagery of their target. Described by HiRISE Principal Investigator Alfred McEwen of the University of Arizona at Tucson as “thrilling and unique,” the images provided a first chance to test the instruments, ahead of the beginning of MRO’s full science program.
However, the conduct of that science program required the spacecraft to adopt a complex, multi-month series of “aerobraking” maneuvers to establish itself into the optimum orbit for imaging and data collection. This got underway on 30 March, when MRO fired its thrusters for 58 seconds in readiness for the lengthy aerobraking campaign. From 7 April through 30 August, the three-step procedure dipped MRO into the wispy fringes of Mars’ atmosphere no less than 426 times, serving to minimize propellant expenditure and reduce the farthest point of its orbit in order to almost circularize it. “Aerobraking is like a high-wire act in open air,” explained Jim Graf. “Mars’ atmosphere can swell rapidly, so we need to monitor it closely to keep the orbiter at an altitude that is effective and safe.” By 11 September, the orbit had been fine-tuned to about 155 x 196 miles (250 x 316 km), and the 33-feet-long (10-meter) SHARAD radar was activated, ahead of the beginning of MRO’s primary science operations in early-November.
Within days, on 17 November, the spacecraft was first employed for one of its key aims, by serving as a communications relay for the Spirit rover, which was then operational and exploring Low Ridge Haven, not far from McCool Hill, one of seven hills named in honor of the fallen STS-107 crew. In fact, MRO’s first full Earth-year of operations, 2007, commenced in fine style, when in February it surpassed the record for the maximum quantity of science data ever returned by any spacecraft at Mars. In less than three months—and despite significant noise in one of its HiRISE camera pairs and positioning errors noticed in the MCS—it had returned enough data to fill almost 1,000 CD-ROMs, which tied the record achieved between 1997-2006 by Mars Global Surveyor. Later that same month, HiRISE identified its first evidence for the passage of liquid or gas through underground rocks at the Candor Chasma canyon, whilst in September a series of five papers in the journal Science dealt with CRISM and SHARAD findings of material deposited in gullies within the past several years, as well as geologically recent polar-ice layers and signs of water released by ancient impact events.

It was but a prelude for the spectacular results which were to come. By the end of 2008, CRISM surveys of intact bedrock layers surrounding the 925-mile-diameter (1,490-km) Isidis impact basin had identified carbonate layers, indicative of the presence of neutral to alkaline water at some point more than 3.6 billion years ago. By this stage, MRO had been in its operational orbit for two years, thus concluding its primary mission, and during that period had returned 73 terabits of data, conducted 10,000 targeted observation sequences, imaged nearly 40 percent of the surface at resolutions capable of showing house-sized objects in detail, taken 700 daily global weather maps, and revealed traces of a complex Martian history of climate change which produced a diversity of past watery environments. “Among the major findings during the primary science phase is the revelation that the action of water on and near the surface of Mars occurred for hundreds of millions of years,” NASA explained in a news release. “This activity was at least regional and possibly global in extent, though possibly intermittent. The spacecraft also observed that signatures of a variety of watery environments, some acidic, some alkaline, increase the possibility that there are places on Mars that could reveal evidence of past life, if it ever existed.”
The Red Planet was showing itself to be quite different from the barren, lifeless world of deserts and craters which had first been imaged by NASA’s Mariner 4 spacecraft, back in July 1965. SHARAD results had already indicated that Mars’ crust and upper mantle were colder than previously believed, whilst a pair of studies in the journals Nature and Nature Geosciences, published in mid-2008 and based upon CRISM data, pointed to the presence of enormous lakes, flowing rivers, and a rich variety of wet environments in the distant past. Specifically, these highlighted clay-like minerals, called “phyllosilicates,” which are known to form in the presence of water. Vast glaciers of water-ice, buried beneath rocky debris and identified by SHARAD data, were described by one scientist as “the largest reservoir of water-ice on Mars that is not in the polar caps,” whilst CRISM observed hydrated silica—more commonly known as opal—and provided a telltale indicator of when and where water deposits may have been present on the ancient surface. As for the polar caps themselves, SHARAD results from May 2010 revealed intricately complex structures within the deep, meandering northern canyon of Chasma Boreale and offered tantalizing clues about Mars’ evolving climate.
Entering its fifth year of operations, 2011 for MRO was one of the most dramatic to date. In April, SHARAD identified the presence of frozen carbon dioxide at the south pole—around 30 times more than predicted—which led to suggestions of significant atmospheric pressure changes due to variations in Mars’ axial tilt, which might potentially impair the stability of liquid water and increase the severity and frequency of dust storms. Those storms pointed to the dynamic nature of the surface itself, with HiRISE imagery cleared showing sand dunes and ripples moving at dozens of locations. Due to the thin nature of the Martian atmosphere, gusts as strong as 80 mph (130 km/h) are needed to move sand grains, as opposed to just 10 mph (16 km/h) on Earth. Of potentially enormous significance to the question of ancient life on the planet was the announcement, in August 2011, of possible flowing briny water during Mars’ warmest months.
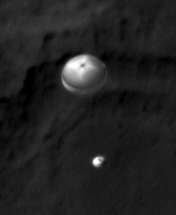
Of course, the identification of regions where water may once have flowed in abundance was just part of MRO’s mission. Another key aspect was its role in supporting other missions and it came again to the fore in August 2012, when the Curiosity rover descended beneath parachutes and an untried “Sky Crane” to touch down safely in Gale Crater. Throughout the Entry, Descent and Landing (EDL) phase—popularly, and appropriately, nicknamed “The Seven Minutes of Terror”—MRO captured stunning, first-of-its-kind imagery via HiRISE of the rover’s descent through the thin Martian atmosphere. Described by HiRISE investigator Sarah Milkovich of JPL as “the closest thing you can get to paparazzi on Mars,” the images were captured when MRO was about 211 miles (340 km) away from the rapidly descending Curiosity. Such images required months of planning to perfect the exact timings. “If HiRISE took the image one second before or one second after, we probably would be looking at an empty Martian landscape,” continued Milkovich. “When you consider that we have been working on this sequence since March and had to upload commands to the spacecraft about 72 hours prior to the image being taken, you begin to realize how challenging this picture was to obtain.”
Yet the descent of Curiosity to the surface was not the only one of MRO’s accolades. Together with NASA’s Mars Odyssey and the European Space Agency’s (ESA) Mars Express, it also provided a valuable role in the site selection for the Phoenix lander, which, in May 2008, became the first spacecraft to touch down and complete a successful mission from one of Mars’ polar regions. During the spacecraft’s parachute-assisted descent, navigational data was uploaded to MRO on landing day and HiRISE was directed toward the surface at an angle of about 62 degrees, revealing the parachute, lander and connecting cords. “I’m floored,” was all Phoenix Project Manager Barry Goldstein of JPL could say of the imagery. “I’m absolutely floored!”
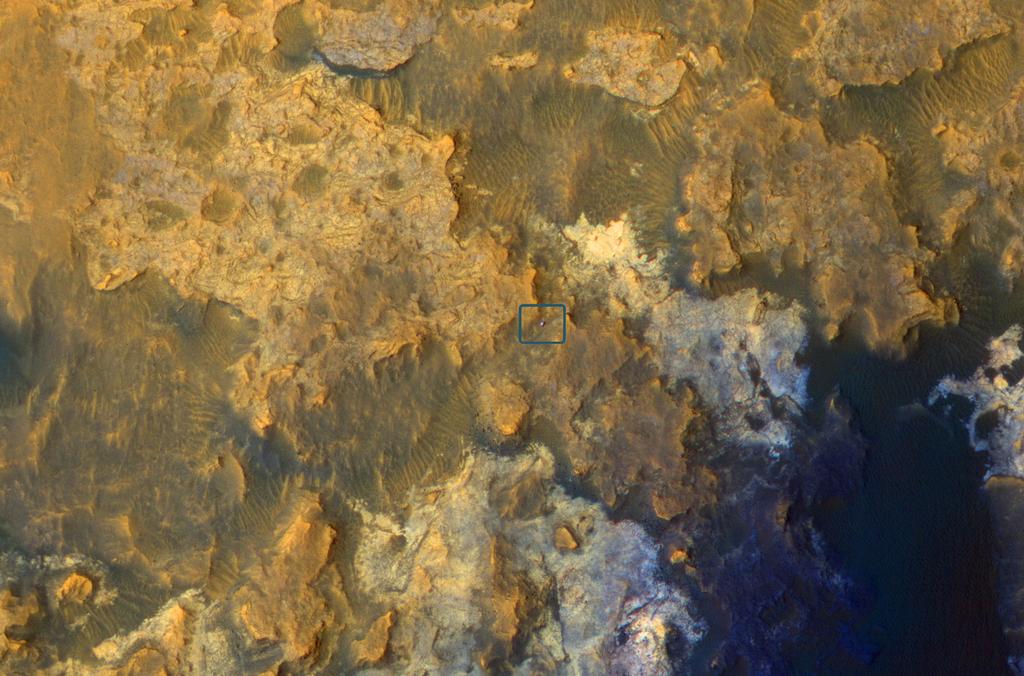
And to a great extent Goldstein’s words sum up the enormous success of the MRO mission. Since it departed Earth, a decade ago, today, it has returned more data about the Red Planet that any other spacecraft in history. However, a full seven years since the end of its primary science mission, it continues to go strong and has provided tantalizing clues about the fate of two old Mars missions, one from the Soviet Union and the other from Europe. In April 2013, HiRISE spotted four pieces of hardware—parachute, retrorocket, heat shield and lander—which seemed to correspond with the locality in which Russia’s Mars 3 touched down in December 1971. More recently, in January 2015, it provided a New Year’s gift for Europe, by spotting Britain’s lost Beagle 2 lander on the surface, and the HiRISE imagery indicated that the ill-fated spacecraft had at least partially deployed its electricity-generating solar arrays. A month later, on 9 February, it completed its 40,000th orbit of Mars, by which time it had returned 247 terabits of data, more than the combined total from every other mission ever to leave Earth and visit another planet. Then, in April, HiRISE clearly pinpointed the movements of Curiosity as the rover entered “Artist’s Drive,” on the lower slopes of Aeolis Mons (“Mount Sharp”), at the center of Gale Crater.
Aside from its immense contributions to our understanding of Mars, MRO’s role as a communications relay to assist other missions during their approach, orbital insertion, entry, descent, and landing operations have been nothing short of remarkable. It has relayed data from the Spirit rover, spotted the tracks of the Opportunity rover, photographed the descent of both Phoenix and Curiosity and now—after more than a decade of uncertainty—has provided closure for the Beagle 2 team and shown them that their craft actually made it to the blood-red plains of Mars’ surface. “MRO has helped find safe landing sites on Mars for the Curiosity and Phoenix and has searched for missing craft to learn what may have gone wrong,” said Richard Zurek. “It’s an extremely difficult task, as the craft are small and the search areas are vast. It takes the best camera we have in Mars orbit and work by dedicated individuals to be successful at this.”
Just two weeks ago, NASA executed a 77-second thruster firing to adjust MRO’s orbit timing, to enable the spacecraft can provide critical telecommunications support for the InSight lander, when it touches down on Mars in September 2016. It was reported that two larger maneuvers by MRO will also be performed in October 2016 and April 2017 to return the veteran spacecraft to its original science-gathering orbit, although it will still have plenty in reserve. “Even after the planned 2017 maneuver,” NASA explained, “the spacecraft’s remaining supply of hydrazine propellant is projected to be more than 413 pounds (187 kg), equivalent to about 19 years of consumption in normal operations.”
Want to keep up-to-date with all things space? Be sure to “Like” AmericaSpace on Facebook and follow us on Twitter: @AmericaSpace
