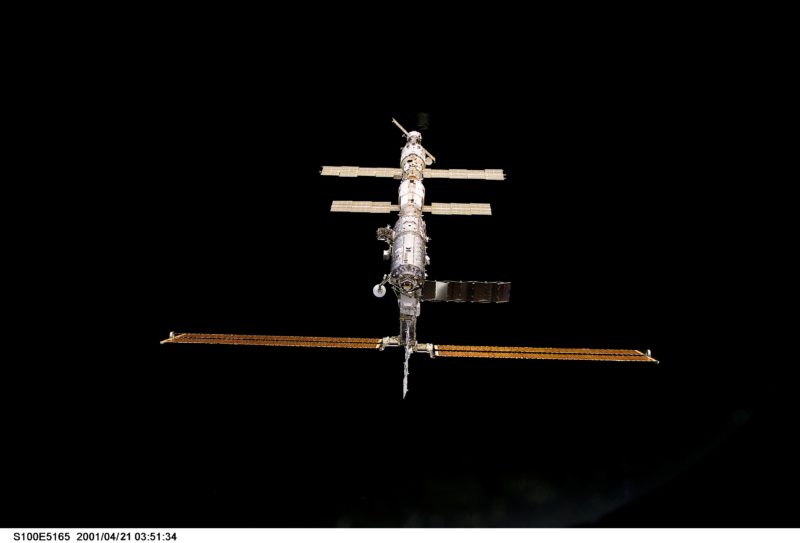
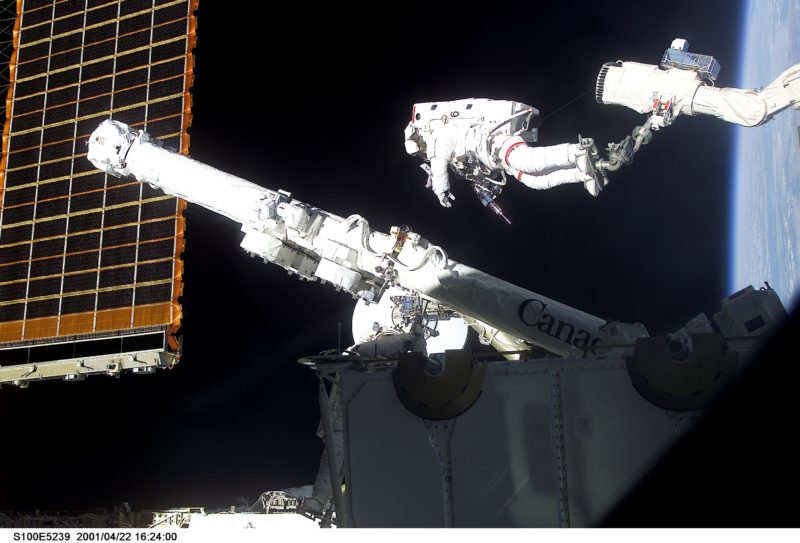
Twenty years ago today, a key player in enabling the construction, expansion and maintenance of the International Space Station (ISS) was lofted into orbit aboard shuttle Endeavour and her STS-100 crew. Canada’s contribution to the station program—the 57.7-foot-long (17.6-meter) Canadarm2, otherwise known as the “Big Arm”—is an evolution of the shuttle’s own Remote Manipulator System (RMS).
Since its arrival in April 2001, Canadarm2 has helped build the Integrated Truss Structure (ITS), laden with power-producing solar arrays, batteries and radiators, and install pressurized and unpressurized components from NASA and its international partners. And between September 2009 and February 2021, the Big Arm has captured, berthed, unberthed and released no fewer than 44 unpiloted cargo ships from the U.S. Operational Segment (USOS). It would not be excessive to state that Canadarm2 has been one of the station’s most significant elements.
Ever since President Ronald Reagan initially proposed a U.S.-led space station in his January 1984 State of the Union address, Canada was a staunch supporter and participant, through its Mobile Servicing Center (MSC) for robotic assembly and maintenance. The station was named “Freedom” in June 1988 and subsequently evolved through several design incarnations, as well as a painful redesign process, before drawing in Russian partnership and experiencing a rebirth as the ISS.

By the middle of 1997, less than a year ahead of the scheduled start of construction, Canadarm2—officially designated the Space Station Remote Manipulator System (SSRMS)—was baselined for ISS Assembly Mission 6A, the sixth dedicated shuttle construction flight, then planned for a June 1999 launch aboard Atlantis. Unlike the RMS, the Big Arm had seven degrees of freedom and, through the presence of two “wrists” and two “hands,” carried the ability to “inchworm” along the ISS structure by means of interfacing with Power and Data Grapple Fixtures (PDGFs). This gave it a far greater reach than its shuttle counterpart.
In anticipation for this and other EVA- and robotics-heavy missions, a cadre of spacewalkers were announced by NASA in June 1997. Assigned to 6A were Chris Hadfield, who would become Canada’s first spacewalker, together with NASA’s Bob Curbeam. During two planned EVAs, Hadfield and Curbeam were tasked with outfitting the newly-arrived U.S. lab and installing the 3,970-pound (1,800-kg) Canadarm2.
“It was the world’s most expensive and sophisticated construction tool, and getting it up and running would require not one EVA, but two,” wrote Hadfield in his memoir, An Astronaut’s Guide to Life on Earth. “And I was EV1, lead spacewalker, though I’d never been outside a spaceship in my life.”
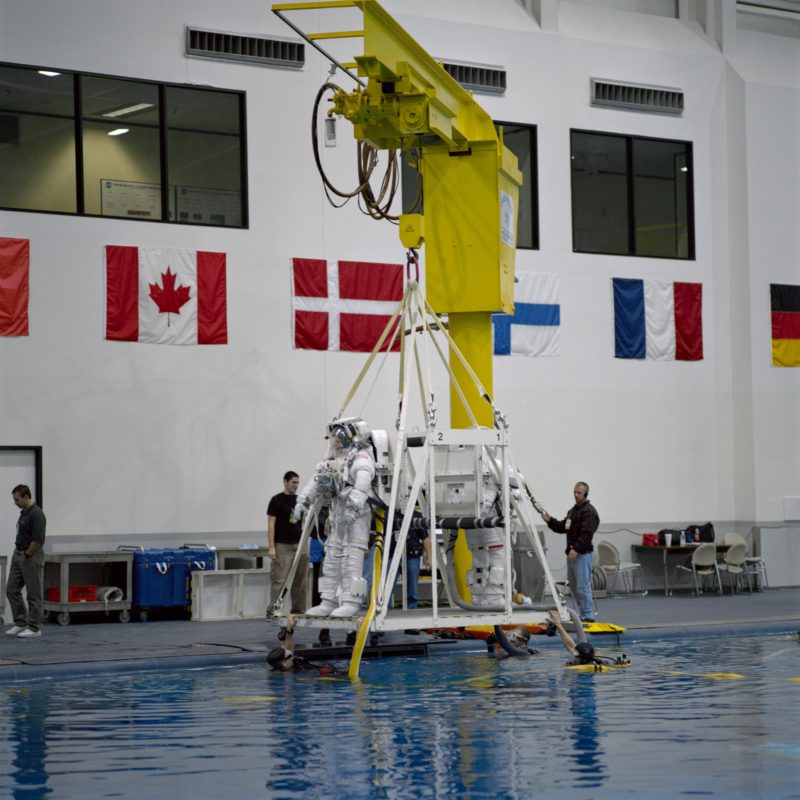
Comparing spacewalking to simultaneously rock-climbing, weightlifting, repairing a small engine and performing an intricate pas de deux, Hadfield soon recognized that each of the two EVAs needed to be carefully choreographed by hundreds of people. “Hyper-planning is necessary because any EVA is dangerous,” he wrote. “You’re venturing out into a vacuum that is entirely hostile to life. If you get into trouble, you can’t just hightail it back inside the spaceship.” For the next two years, Hadfield and Curbeam worked to develop their two EVAs and became a close-knit team.

At the same time, delays to the ISS construction effort caused 6A and several other missions to slip to the right, eventually until mid-2000 at the soonest. And in September 1999—following the removal of veteran NASA spacewalker Mark Lee from STS-98—Curbeam was shifted into his former spot and seasoned shuttle astronaut Scott Parazynski was moved up to join Hadfield on 6A.
Finally, as ISS assembly resumed after two years of delays, the mission received the remainder of its crew. By this stage, 6A’s objectives had expanded to include the second flight of the Italian-built Multi-Purpose Logistics Module (MPLM) and in February 2000 Italian astronaut Umberto Guidoni was assigned to join Hadfield and Parazynski. Rounding out the seven-strong crew, in September 2000 NASA named astronauts Jeff “Bones” Ashby and John Phillips and Russian cosmonaut Yuri Lonchakov, commanded by four-time shuttle veteran Kent Rominger.

With U.S., Russian, Italian and Canadian astronauts and cosmonauts, this made STS-100 the most diverse international crew ever to have flown aboard the shuttle at that time. Four discrete nations represented on one mission neatly eclipsed the previous record of three nations, which had been achieved on several previous shuttle flights. STS-51G in June 1985 counted citizens of the United States, France, and Saudi Arabia on its crew, whilst a number of post-Challenger missions also boasted representatives of three nations.
“Its members represent more nations than has any other single crew,” noted NASA’s press kit for STS-100. “Once aboard the station, four out of five of the project’s major partners will be represented, the most that have ever been aboard the complex together.”

By this stage 6A had shifted to shuttle Endeavour and the mission designator of STS-100—“Nice, round number”, according to Hadfield in a pre-flight NASA interview—had moved to no earlier than April 2001. Liftoff of what Rominger labeled “an aggressive flight” took place on-time at 2:41 p.m. EDT on 19 April.
Endeavour quickly cleared the tower of historic Pad 39A at the Kennedy Space Center (KSC) in Florida and rolled onto her back, bound for a 51.6-degree-inclination orbit and a rendezvous and docking with the ISS, two days later. During this period, Rominger, Ashby and Phillips oversaw a series of thruster “burns” to more closely align their orbit with that of the multi-national outpost, whilst Hadfield and Parazynski worked to prepare their bulky space suits and Guidoni and Lonchakov prepared for cargo transfer operations.

Early on 21 April—having been awakened to the strains of Kenny Loggins’ song “Danger Zone”—the crew brought Endeavour to a point about 600 feet (180 meters) “below” the station, before Navy Top Gun grads Rominger and Ashby executed the final rendezvous. (Interestingly, Ashby graduated from the Navy’s famed Fighter Weapons School in 1986, the very same year that the movie Top Gun and Loggins’ tune were released to worldwide acclaim.)
With pinpoint finesse, Rominger docked smoothly at the Pressurized Mating Adapter (PMA)-2 interface, at the forward-facing end of the U.S. Destiny laboratory, at 9:59 a.m. EDT. At the time of contact and capture, the two vehicles were flying high above the southern Pacific Ocean, just to the south-east of New Zealand.
Hatches would remain closed until after Hadfield and Parazynski’s first EVA, since Endeavour’s cabin pressure had been reduced from its normal 14.7 psi to 10.2 psi, in order to accommodate “pre-breathing” requirements. That said, the astronauts briefly entered PMA-2 shortly after docking to retrieve a Pistol Grip Tool (PGT), left there by the Expedition 2 crew, which would be utilized during the EVA. In return, they left water containers, computer equipment, fresh food, film for the IMAX camera and Flight Data File (FDF) documentation for the resident Expedition 2 crew of Russian cosmonaut Yuri Usachev and U.S. astronauts Jim Voss and Susan Helms.
With their 6.5-hour EVA-1 timed to begin in the small hours of 22 April, Hadfield and Parazynski and their crewmates awakened early and set to work preparing tools and equipment and donning their EMUs. Assisted by “Intravehicular” (IV) crewman Phillips, Hadfield was outfitted in the “EV1” suit, with red stripes on the legs for identification, whilst Parazynski wore a pure white suit and carried the designation of “EV2”. Operating the shuttle’s RMS during the excursion were Ashby and Guidoni. In honor of Canada’s first spacewalk, the crew was awakened by the sounds of the late Canadian folk musician and singer-songwriter Stan Rogers.
And with the delivery of Canadarm2 to the station, the opportunity would arise for the first parallel use of two robotic arms—on two different piloted spacecraft—at the same time. Figuratively and literally, the long-serving shuttle RMS would perform a unique “handshake” with its newer, larger, and more capable ISS counterpart.
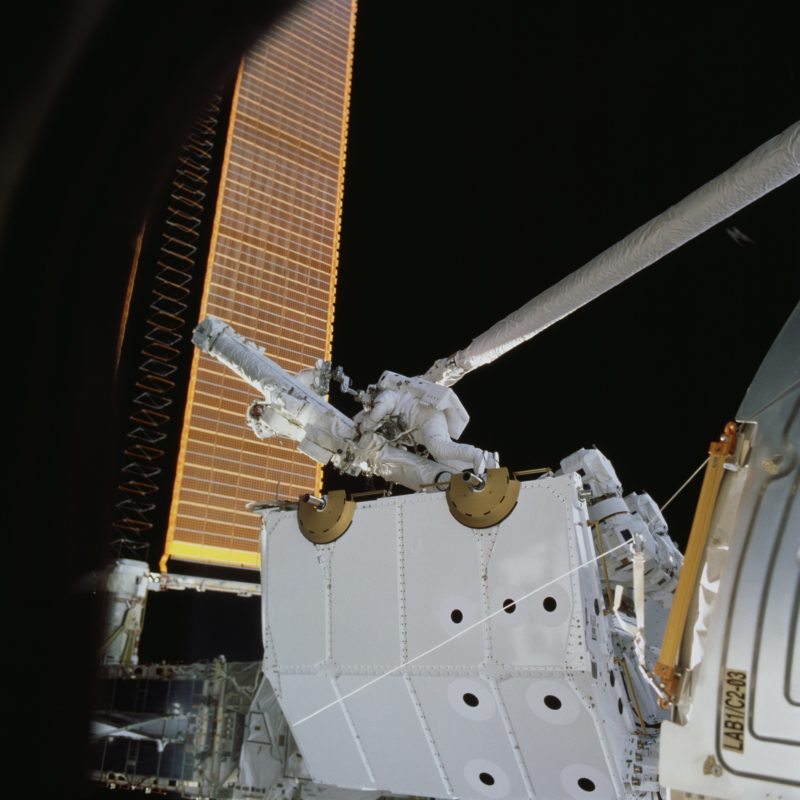
The spacewalk got underway at 7:45 a.m. EDT on 22 April and the duo quickly set to work. Working from inside the shuttle, Ashby and Guidoni used Endeavour’s RMS arm to detach a Spacelab pallet from the payload bay and latch it to a cradle atop the Destiny lab. Aboard this pallet was the 3,970-pound (1,800 kg) Canadarm2, as well as an Ultra-High Frequency (UHF) antenna to enable space-to-space communications on future EVAs and between the shuttle and the ISS.

Within the first two hours, Hadfield and Parazynski had successfully attached the UHF antenna onto Destiny, before turning to their next major objective: the installation of Canadarm2 itself. With Hadfield working on the RMS and Parazynski “free-floating,” they released four cables to provide power, commanding, and video to and from the Flight Support Equipment Grapple Fixture (FSEGF) on the pallet, which would provide the Big Arm’s early base on the space station. Parazynski connected these cables to Destiny, which enabled Canadarm2 to be controlled via a Robotics Workstation (RWS) inside the lab.
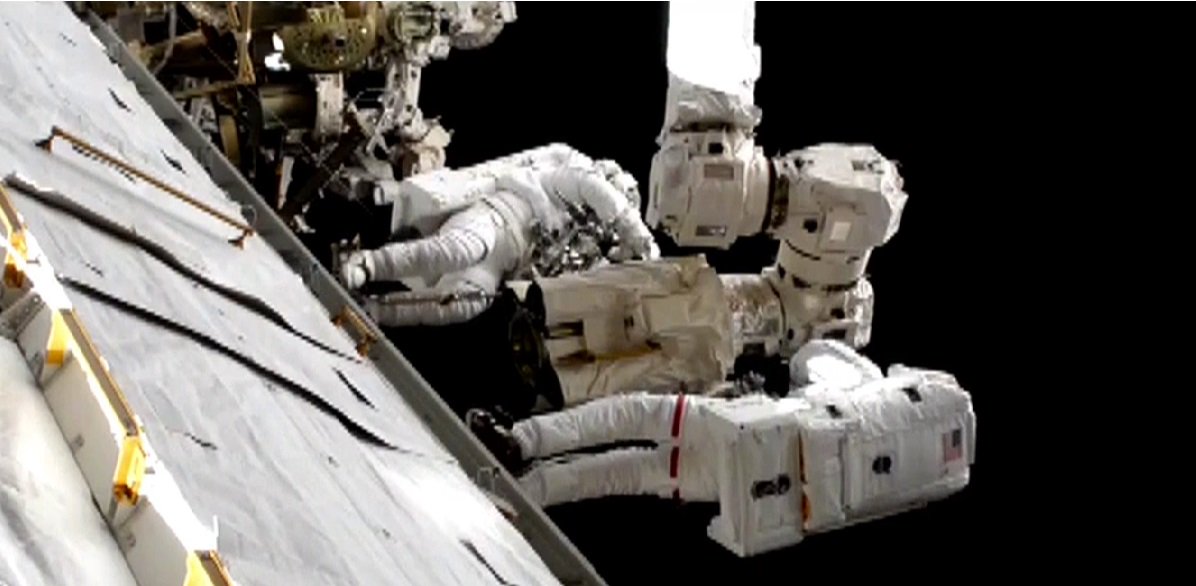
With the UHF antenna installation behind them, the spacewalkers removed insulating blankets from the elements of the Big Arm and released 32 small “jackbolts”, then eight large “super bolts.” This allowed them to deploy the arm’s main boom and a few minutes later they were in position to begin unfolding its second boom.
Next, they employed a Pistol Grip Tool (PGT) to secure expandable diameter fasteners, which kept the two booms rigidized. Hadfield and Parazynski wrapped up their EVA, cleaned up their work site, and returned inside Endeavour at 2:55 p.m. EDT, after a spacewalk which had lasted seven hours and 10 minutes. At around the same time, from inside Destiny, Voss and Helms successfully commanded the first motion of Canadarm2.
“It really just opens the door to what all of us can be doing here internationally,” said Hadfield, “beginning to explore space as a planet.” Fellow Canadian astronaut Steve MacLean offered a message of congratulations and the national anthem “O, Canada” was played in Hadfield’s honor.

But the work was not yet over. From inside the station, Helms commanded Canadarm2 to begin a three-hour “walk-off” from the Spacelab pallet and onto Destiny. In essence, the Big Arm “switched ends”, with the lab’s PDGF becoming its new base. Hadfield and Parazynski’s second EVA lasted seven hours and 40 minutes.
The pair opened a panel on the Destiny lab’s exterior, enabling Parazynski to hook up power, data, and video cables and establish connections for the PDGF circuits. Despite the early failure of a backup power circuit, the spacewalkers and Expedition 2 crew member Susan Helms were able to access another connector and complete the redundant power path to the Big Arm.
On the evening of the 27th, Helms performed Canadarm2’s first major hardware relocation, as she manipulated the Spacelab pallet from Destiny and back aboard the shuttle for its return to Earth. At the controls of Endeavour’s RMS to receive the pallet was Chris Hadfield. The event marked the first-ever robotic-to-robotic transfer in space, as well as the last major task of STS-100.
At 1:34 p.m. EDT on 29 April, Endeavour undocked smoothly from the space station to begin her return journey to Earth. Cloud cover, showers, and gusty winds at the Shuttle Landing Facility (SLF) at the Kennedy Space Center (KSC) in Florida ultimately forced a decision to bring the shuttle home to Edwards Air Force Base, Calif., and Rominger and Ashby guided their ship to a safe touchdown in ideal weather conditions at 9:11 a.m. PDT (12:11 p.m. EDT). STS-100 had traveled over 4.9 million miles (7.9 million km) and completed 186 orbits in just shy of 12 days in space.
The mission was over, but for Canadarm2 it was merely the beginning of an impressive career in space which continues to this day. The robotic “hand-off” of the Spacelab pallet by Helms and Hadfield was very much a dress rehearsal for the kind of work which the Big Arm would perform in the next few years, as the ISS grew ever larger. Two months later, in July 2001, Canadarm2 was instrumental in the installation of the Quest airlock onto the starboard interface of the Unity node.
Its accomplishments over the following decade included the completion of the station’s expansive Integrated Truss Structure (ITS)—laden with electricity-generating solar arrays, radiators, and batteries—and the activation of pressurized and unpressurized components from NASA and its international partners. Its Mobile Base System (MBS) and Mobile Transporter (MT) were added to the station in 2002 and its “Dextre” Special Purpose Dextrous Manipulator (SPDM) “hand” was installed in 2008, providing for a vastly expanded range of capabilities for Canadarm2.

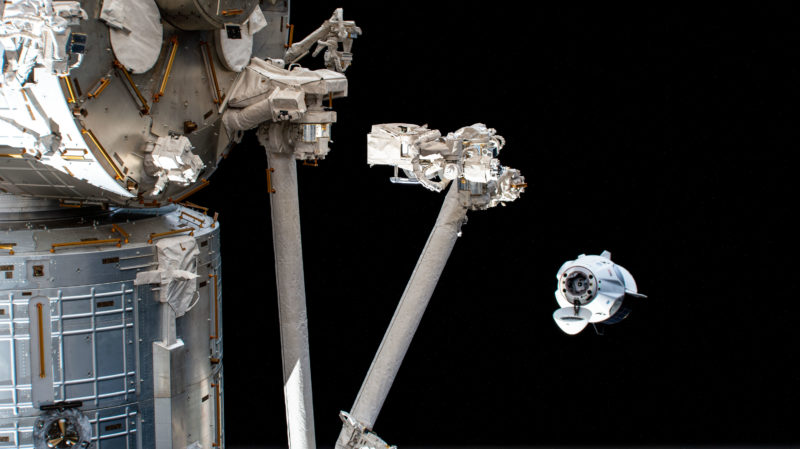
And having robotically captured and berthed Northrop Grumman’s NG-15 Cygnus in February 2021—its 44th “Cosmic Catch” of an unpiloted visiting vehicle since September 2009—Canadarm2 continues to provide impressive service two decades on. It also played a pivotal role in a series of critical U.S. spacewalks earlier this spring and was last week employed to inspect Dragon Resilience ahead of its targeted end-of-month return to Earth. The aging Big Arm received a lube job back in February 2015 and its degraded Latching End Effectors (LEEs) were removed, replaced and lubricated during a series of five spacewalks between October 2017 and February 2018.
As it enters its third decade of service, and with its own successor, Canadarm3, expected to be a central feature of the lunar-circling Gateway, Canadarm2’s future remains bright. Next month, it will unberth and release the NG-15 Cygnus and in August it is slated to make its 45th Cosmic Catch, when it grapples the incoming NG-16 Cygnus. The arm will also play a key role in a series of up to four U.S. spacewalks over the summer.

